A Small Humanoid Robot System Development
Table of Contents
Description
- Time: 2006/9–2008/9
- Research Center of Intelligent Robotics, Shanghai Jiao Tong University, China
- Project Description:
- It was supported by National Natural Science Foundation and New Century Excellent Talents in Universities of China. The aim was to implement a small full-body humanoid robot that can performs various tasks.
- Programming Languages: C/C++
- Hardware: a humanoid robot, F2812 DSP, CAN
- Development Tools: TI Code Composer Studio (CCS) for F2812 programming, Protel for PCB design, MS Visual Studio form high-level software programming, Matlab for simulation and algorithm validation.
- Responsibilities: As the project leader took charge of control system architecture, design and implementation of the motor control subsystem, system integration and biped waking experiment.
Publications
- Publications:
- [Journal] Design and Implementation of Motor Control System for Small Humanoid Robot (in Chinese), ZHANG Yi, LIU Cheng-gang, XING Deng-peng, COMPUTER ENGINEERING, 2009, 35(24).
- Patents:
- Electric Wire Driven Actuator for Artificial Joint, ZL200710038296.6 (Issued)
- General Distributed Control System for Humanoid Robots, ZL200910054322.3 (Issued)
- Distributed Dual-bus Motion Control System for Humanoid Robots, 200810038844.X (Published)
Demos
Motor control system integration test
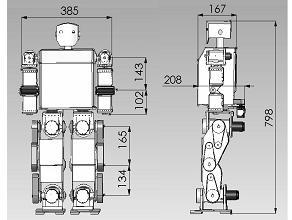
Dimension
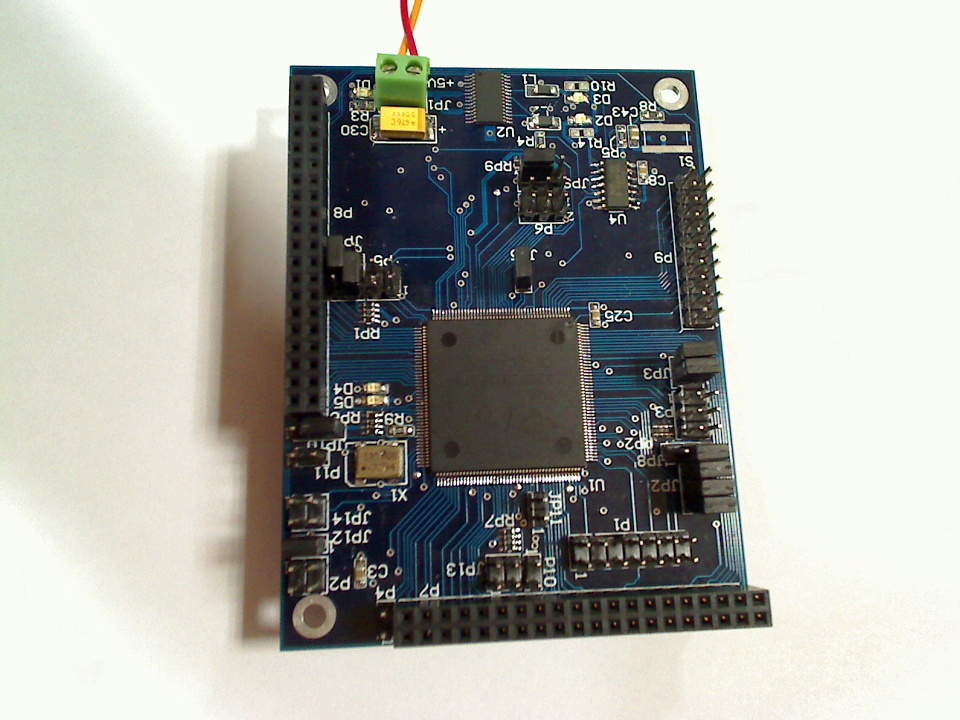
Motor control board
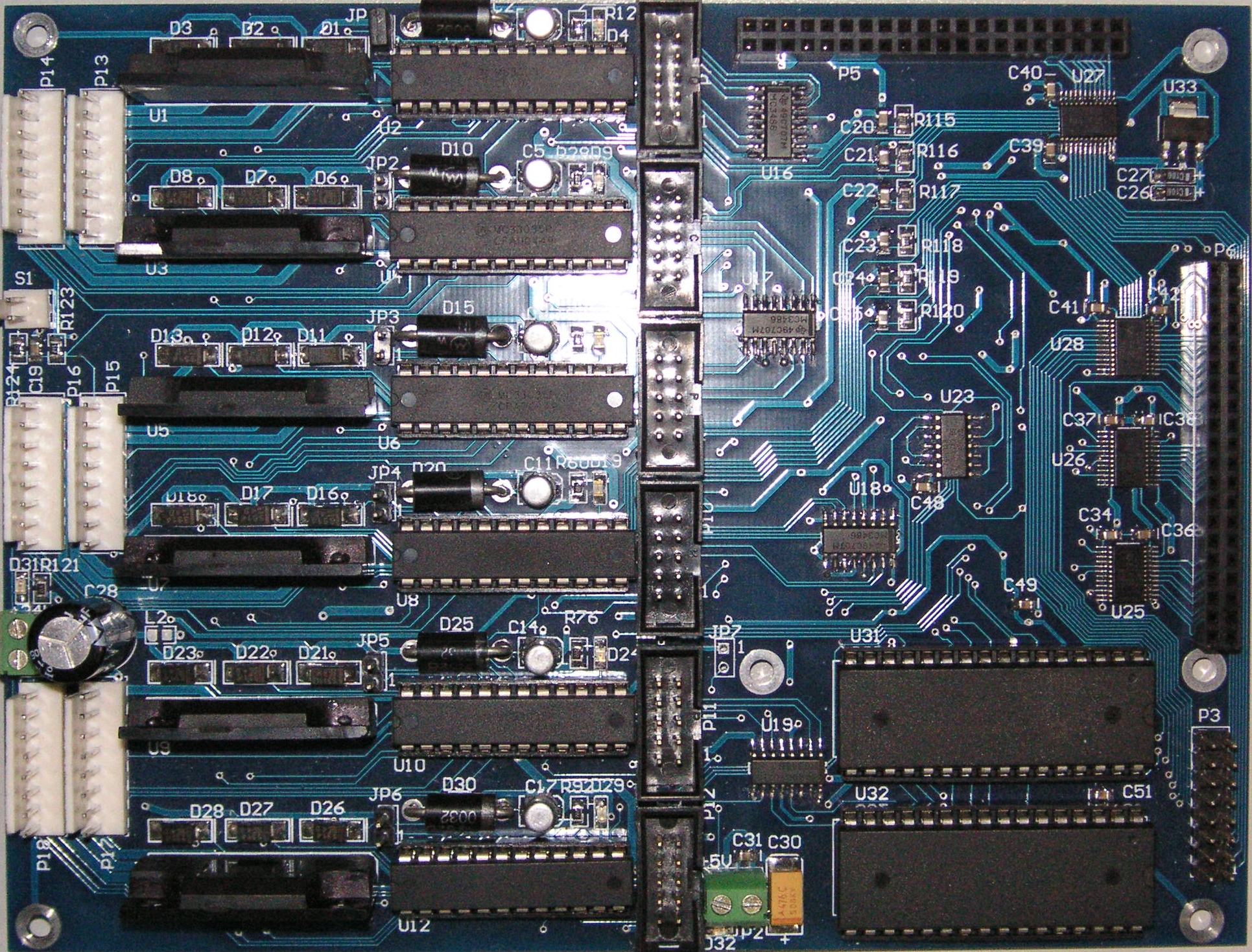
Motor drive board
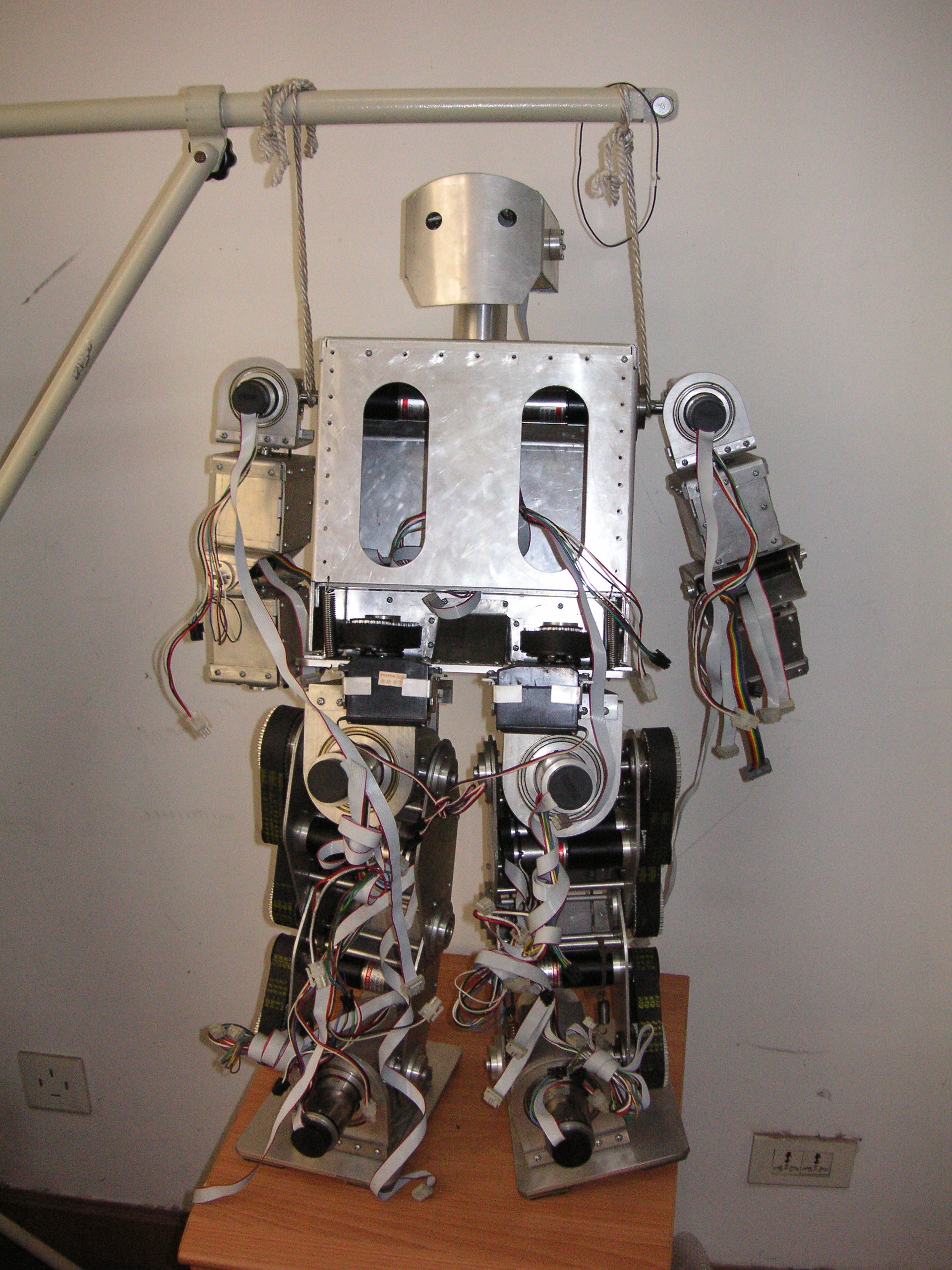
Full-body humanoid robot
Control terminal